

The primary motivation behind 10BASE-T1S was to bring Ethernet capabilities to edge devices in automotive and industrial settings while addressing the specific needs of these environments such as space constraints, electromagnetic interference, and the need for simplified, cost-effective networking solutions.Summary of the background and motivation for Ethernet 10BASE-T1S:
“The CAN bus got us here, but it won’t take us there.”
That’s the sentiment quietly building up in automotive engineering halls.
With the shift toward Software-Defined Vehicles (SDVs) and zonal architectures, OEMs are rethinking how to wire their cars not just physically, but also logically. In this rethink, 10BASE-T1S is beginning to stand out not because it’s fast or flashy, but because it’s the right fit for the right job.
Legacy vehicle networks are like patchwork quilts: CAN for control, LIN for peripherals, FlexRay where needed. These protocols were designed for specific use cases, and they’ve served well but they don’t scale well into tomorrow’s IP-driven world.
Here’s the catch with them:
In contrast, Automotive Ethernet offers:
And that’s where 10BASE-T1S earns its place.
When people hear “Ethernet,” they often think of high-speed, high-cost, or point-to-point links like 100BASE-T1 or 1000BASE-T1.
But 10BASE-T1S plays a very different role:
That makes it ideal for SDVs, where dozens or hundreds of edge nodes need simple, secure, time-aware connectivity.
Let’s break it down into the core reasons it matters:
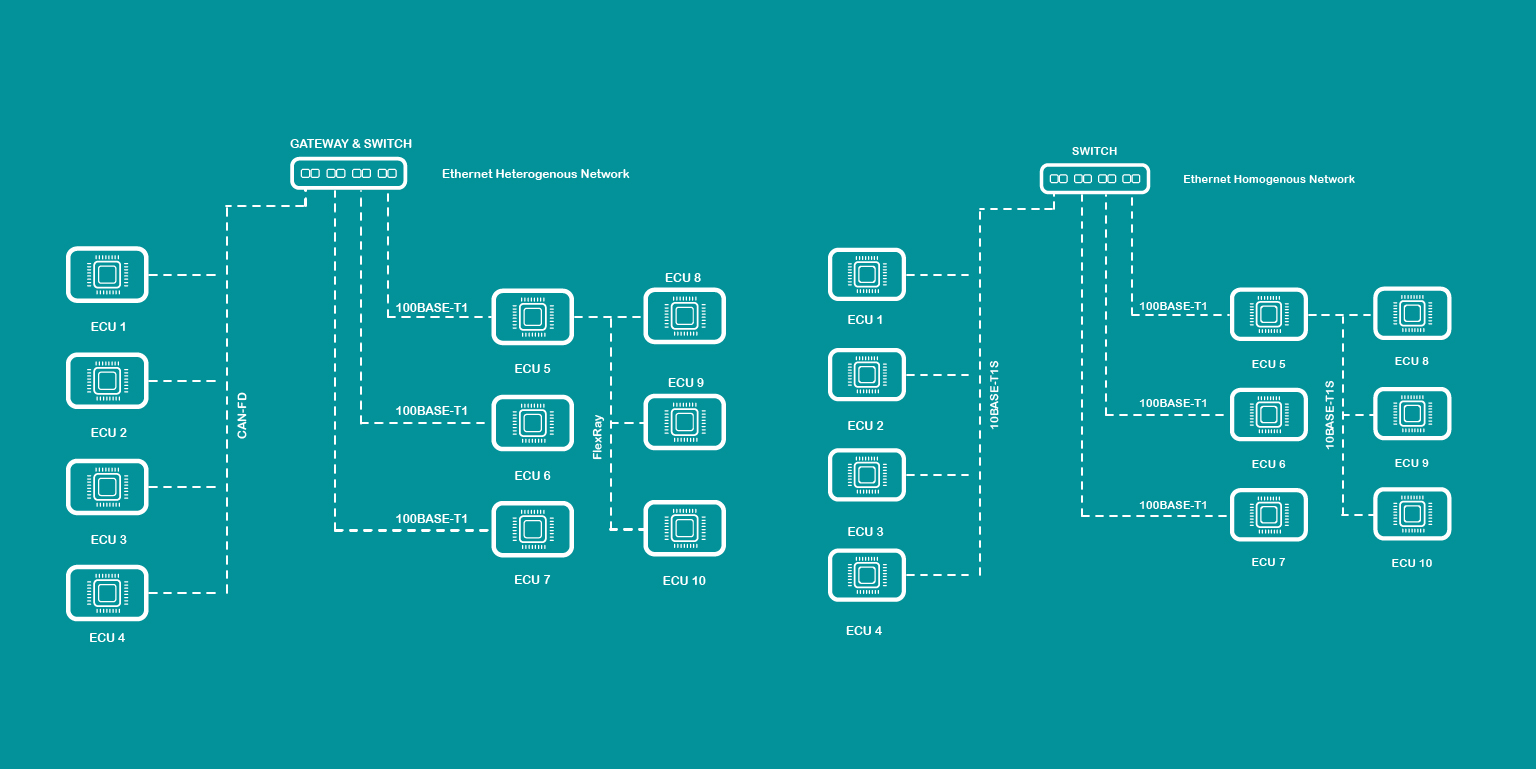
Instead of mixing CAN, LIN, and Ethernet, engineers can now use Ethernet for everything. 10BASE-T1S allows edge devices to plug directly into the IP network. No gateways. No translation layers.
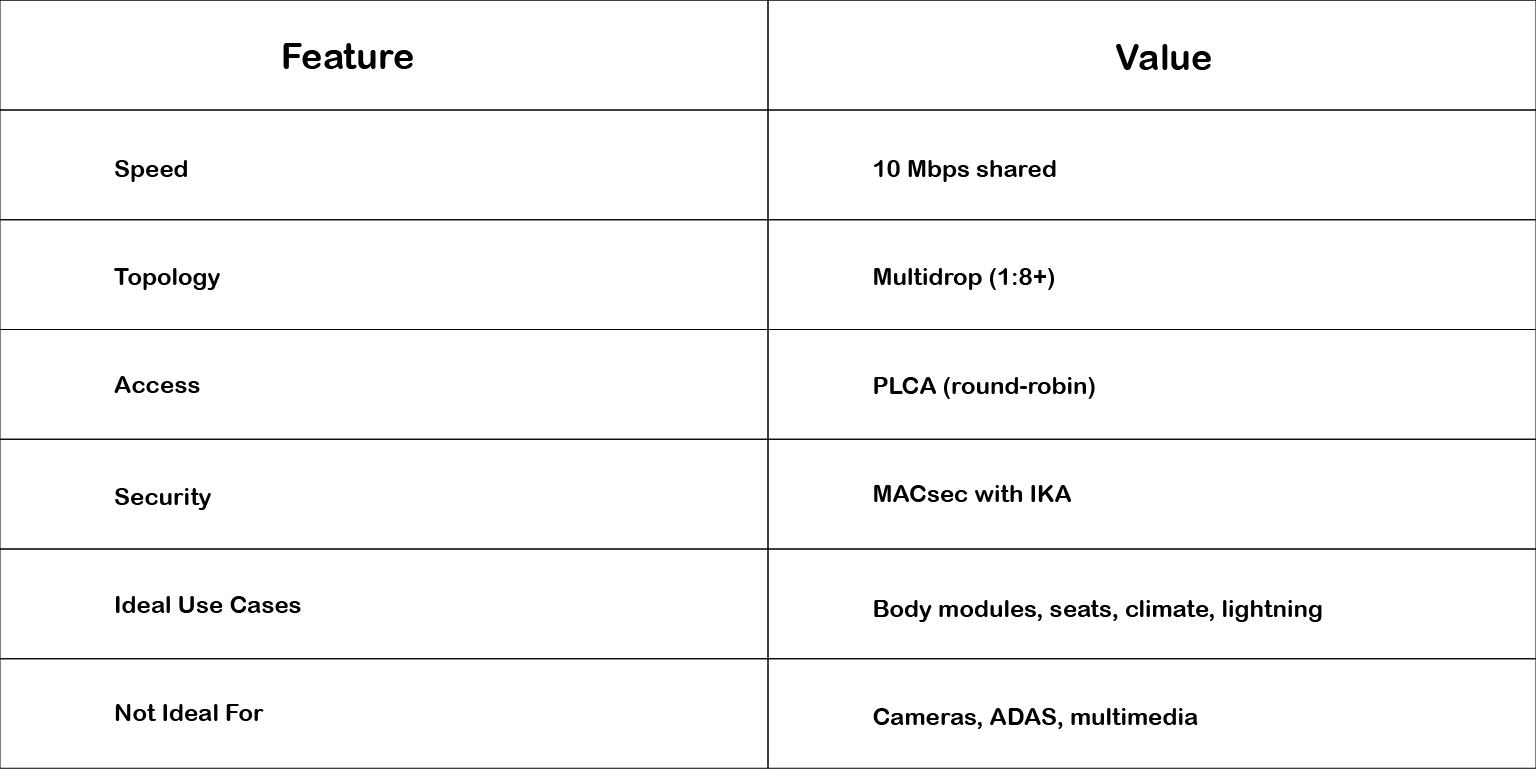
10BASE-T1S uses a single twisted-pair cable that multiple ECUs can share.
No need for:
You can run 8 or more nodes on the same cable perfect for doors, roofs, seats, HVAC zones, and more.
Here’s the magic: 10BASE-T1S uses PLCA (Physical Layer Collision Avoidance) not CSMA/CD like traditional Ethernet.
Every node is given a turn to transmit (called a Transmit Opportunity).
There’s:
This deterministic access is crucial in automotive use cases especially for real-time signals that can’t afford jitter.
.png)
Zonal architectures need to be:
10BASE-T1S fits that perfectly. Once all edge ECUs are IP-addressable over Ethernet, updating them is just software deployment, no separate buses, firmware bridges, or interface headaches.
A common critique of shared media: “What about security?” 10BASE-T1S supports MACsec (IEEE 802.1AE) for encryption and authentication.But standard MACsec has a delay issue in shared networks.
The workaround? IKA (Infineon’s Intrusion-resistant Key Agreement), which embeds keys inline 10× faster than MKA in many tests. That means you can encrypt the bus even in multidrop setups without losing time.
From IEEE research and industry papers:
Here’s PLCA simplified:
Benefits:
All of this happens at the PHY layer, making it robust against noise and electrical interference perfect for harsh automotive environments.
10BASE-T1S isn’t about speed, it's about efficiency, simplicity, and unity. It’s a backbone for the edges.
As the automotive world transitions to software-first design, every ECU will need to be network-aware, time-synced, and secure. 10BASE-T1S lets you achieve that cost-effectively and scalably.
It’s not here to replace high-speed Ethernet. It’s here to replace CAN, LIN, and complexity.
And that’s a big deal.
Traditional Ethernet required point-to-point connections, adding switches, increasing weight, complexity, and cost. To address power consumption, heat issues, and complexity, we moved to 10BASE-T1S, a simpler, efficient Ethernet technology. 10BASE-T1S changes everything. It brings back the simplicity of a bus topology, letting multiple ECUs share the same wire. Most ECU communication is under 10 Megabits per second, making 10BASE-T1S ideal for control data, just like CAN and FlexRay, but fully Ethernet. Today's cars use many network types, connected by complex gateways, but there's a movement toward a single unified network: Ethernet everywhere.